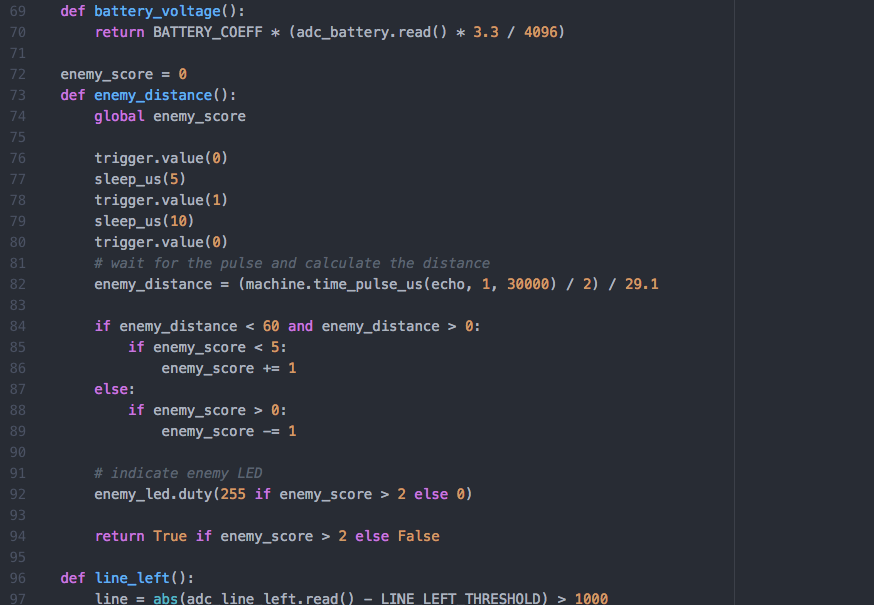
sumorobot-firmware
The software that is running on the SumoRobots
Instructions
- Change the SERIAL_PORT in the Makefile
- Add your WiFi networks to the config.json file
- Install Python
- Install esptool (to flash MicroPython to the ESP32)
- Install ampy (for uploading files)
- Download the MicroPython binary to this directory
- Upload the MicroPython binary and the SumoRobot firmware to your ESP32 (open a terminal and type: make all)
Support
If you find our work useful, please consider donating : )

TODOS
- variable motor speed control, then more interesting for kids